在做对抗训练的时候,我时常在想一个问题:PGD、CW 这些攻击算法都会设置迭代步长和阈值,如果模型固定、参数固定,那么每次生成的对抗样本也会是一样的。如果使用 min-max 的方式进行对抗训练,那么模型可能会只认识在某一设置下的数据,如果面对新的分布攻击样本,如 ZOO, UAP, Deepfool 等,岂不是不能很好的防御?
这就又会回到小样本问题,总不能对所有的攻击算法在不同阈值下都生成对抗样本,而应该生成分布尽可能广泛的对抗样。既然提到生成,就不得不考虑 GAN,所以搜了些相关论文,并作整理。注意,所有论文我没看代码,所以不评价好与坏,在不久的将来如果我要发论文,肯定还会做对比算法,到时候回来评价各个算法。未完待续。
advFlow
AdvFlow: Inconspicuous Black-box Adversarial Attacks using Normalizing Flows, NIPS 2020。
这篇论文提出使用 normal flow 模型来生成对抗样本实现内部的 max。使得生成的对抗样本能围绕在干净样本附近,生成的对抗扰动能捕获图片信息,换句话说,可以根据图片信息来生成对抗扰动。

首先预训练一个神经网络 $f$,这个网络是可逆的:
- 输入为一随机分布 $z$,而后产生 $x$;
- 输入为干净样本 $x$,输入是随机分布 $z$
整个流程如下:(这篇论文的 github 提供了 gif 来描述这个流程)
输入干净样本,经过 $f^{-1}$ 得到均值和方差下的噪音,将噪音再次经过 $f$ 得到对抗样本,将对抗样本输入目标模型,使用损失来更新均值和方差。以此来实现对抗训练。其中的损失、网络细节我没有看。
ADT
Adversarial Distributional Training for Robust Deep Learning, NIPS 2020。
这篇论文和我的关注点一样,果然发顶会手要快。作者认为:对抗训练可不可以理解为数据增强?单个攻击算法并不能代表全部的对抗样本,所以作者提出了 ADT,通过增加熵正则化项,来获取潜在的分布在干净样本周围的对抗样本。以此来作为内部最大化,好的攻击算法才能产生更好的鲁棒性。
由于单个攻击算法不能覆盖全部的扰动,为了避免这个问题,应该找到干净样本附近的对抗样本的分布,而不是单纯的找到一个对抗样本。
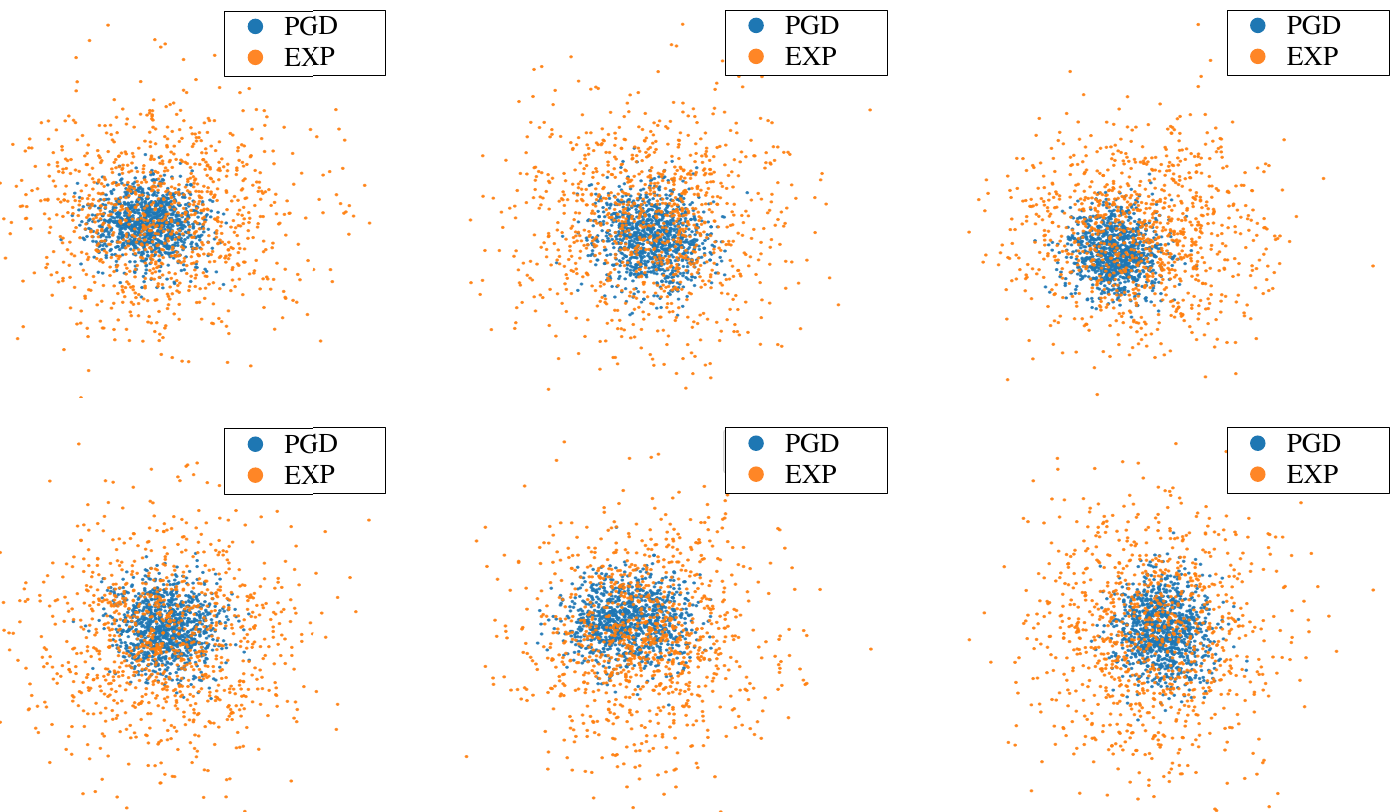
如上图所示,蓝色点是 PGD 产生的对抗样本,黄色点是 ADT 产生的对抗样本。为了使对抗样本的分布具有多样性,增加了熵作为模型损失的一部分,众所周知,熵能衡量系统的稳定性,熵越大越不稳定。也就是,对抗样本的产生方式为:
\begin{equation}
E[L(f(x+\delta), y)] + \lambda H(p(\delta))
\end{equation}
$\delta$ 是对抗扰动,由高斯噪音分布并经过 $\text{tanh}$ 函数映射而来。相对于单个攻击算法,上述公式能更好的探索对抗扰动的分布。
AGAT
Attribute-Guided Adversarial Training for Robustness to Natural Perturbations,发表在 AAAI 2021。
在许多情况下,并不能获得全部的对抗样本,如果预测的对抗样本和训练的对抗样本没有来自同一分布,就会导致鲁棒性的下降。所以本文提出的对抗训练算法中,在内部最大化时,操纵图像属性空间的变化,这样训练出来的模型更具鲁棒性。
这里的属性空间是:翻转算一个属性空间,缩放算一个属性空间,颜色变化又算另一个属性空间。
本文使用的扰动是自然扰动,如图片尺寸和颜色的改变;缩放、旋转、腐蚀等。传统攻击算法的扰动有时会不满足 $\Vert x-x’ \Vert \leq \epsilon$ 的限制,且 $\epsilon$ 太大太小都不好,太小了没扰动效果,太大了图像会失真。但是本文的算法能有效的处理自然的扰动,使用 DNN 来生成扰动(看后文的意思是,输入图像,输出对抗样本)。
这篇论文好多话写的我也不明所以,只能说大概流程是:前 N 个 epoch 训练干净样本,后面几个 epoch 训练对数据以迭代的形式进行扰动增强,而扰动增强这里我感觉很玄学。损失为最小化图像的分类损失、以及最大化干净样本与对抗样本在隐层的差异,以及通过 $L_2$ 范数限制扰动 $\alpha$ 的范围。
advGAN
Generating Adversarial Examples with Adversarial Networks,发表在 IJCAI 2018,使用 GAN 来生成对抗样本。
通过 GAN 来生成围绕着原始实例的高质量扰动来产生对抗样本,判别器来把关生成图像的质量。
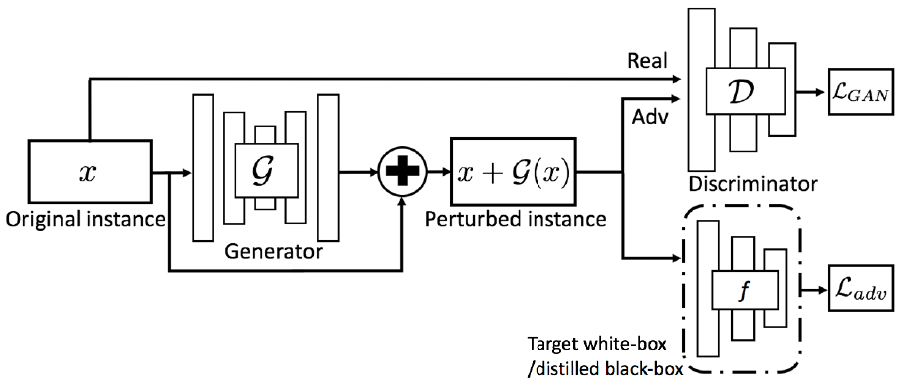
这个图已经把论文的含义表达的差不多了,思路也是简洁明了。输入原始图像,生成扰动并叠加至干净样本。和我最开始的构思一样,可惜被别人发表了。损失函数由三部分组成,一部分是对抗样本的分类损失,一部分是 GAN 的生成和判别损失,一部分是对抗扰动的范围损失,希望扰动范围越大越好。
advGAN++
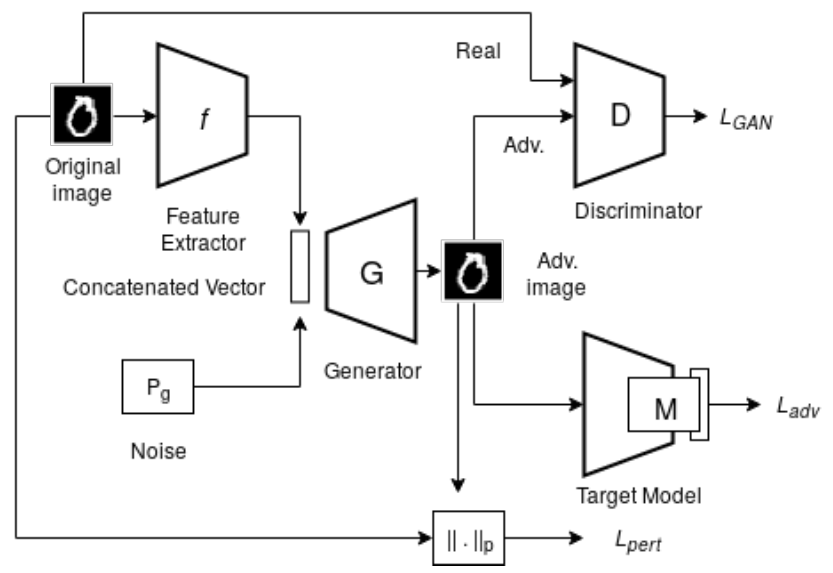
AdvGAN++ : Harnessing latent layers for adversary generation 发表在 ICCV 2019,是基于 advGAN 的改进,之前的 advGAN 是读取全部图像生成对抗扰动,这篇论文发现读取图像的隐层表示生成的对抗扰动会更好,就这样改进了一下。
RobGAN
Rob-GAN: Generator, Discriminator, and Adversarial Attacker,发表在 CVPR 2018。
这篇论文从另一个角度结合了 GAN 和对抗训练,将生成器融入对抗训练,提升判别器的鲁棒性;对抗训练使得 GAN 更快的收敛,并得到更好的生成器,两者互益。这篇论文的出发点同上:生成器生成分布更广阔的数据,使分类器在不可见数据集上获取更好的鲁棒性。
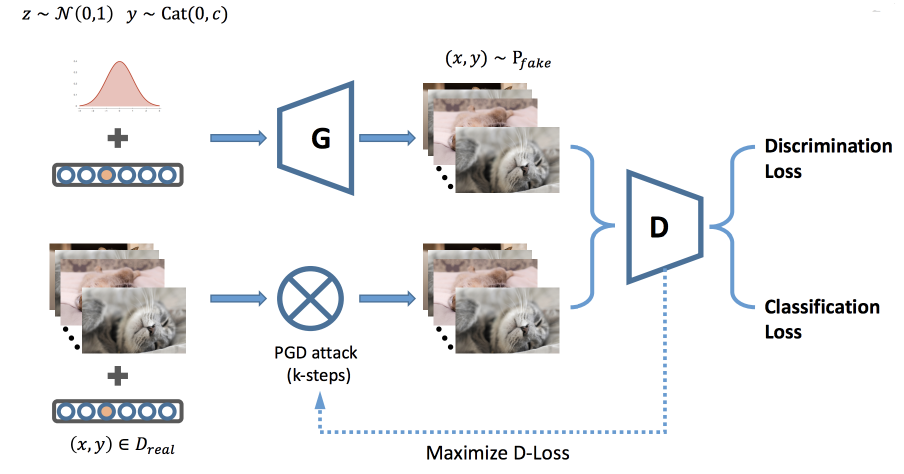
对于 WGAN 的判别器而言,需要判别对抗样本和生成器的虚假样本,所以损失就是使这两者的分类误差达到最小,这里需要注意的是,虚假样本也要加上对抗扰动。
对于鲁棒性差的 GAN 而言,它虽然 smarter 但是 weaker,如下图所示:
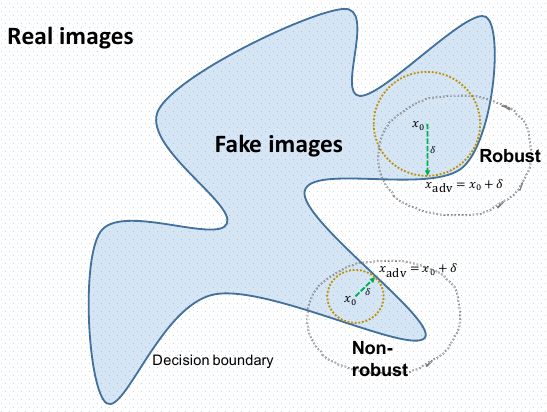
在鲁棒的区域,能有效的抵御攻击而不会错分类。论文给出了一些证明,由于生成网络的任务是欺骗判别器,如果判别器不够鲁棒,那么只需要一点点的更新就可以欺骗判别器。如果判别器鲁棒,那么得到的生成器也会更好。

