在完成超声波避障和1602液晶显示之后,下一步要对小车车增加寻迹的功能,寻迹的模块TCRT5000红外反射传感器,主要的实现原理是:TCRT5000传感器的红外发射二极管不断发射红外时,3脚的电压大于2脚的电压,输出为低电平。根据这个原理就可以写代码啦~
实现的主要功能:
- 白纸上画黑线,小车车会沿着黑线走
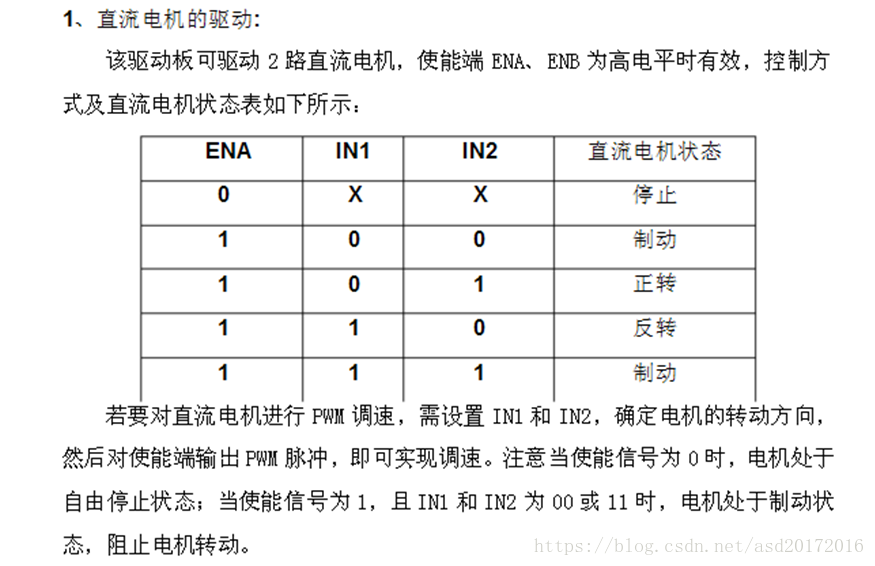
- 顺路介绍下L298N电机驱动模块
L298N
![]()
可能这个图片已经写的很清楚了,一个驱动模块带动两个电极,一个L298N模块需要三个IO口。
寻迹程序
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
| #include <reg52.h>
sbit trace1 = P3^5; 设置的为两个模块去寻迹
sbit trace2 = P2^5;
sbit em1 = P1^4;
sbit em2 = P1^7;
sbit em3 = P2^7;
sbit em4 = P2^3;
sbit in1 = P1^2;
sbit in2 = P1^3;
sbit in3 = P1^5;
sbit in4 = P1^6;
sbit in5 = P3^6;
sbit in6 = P3^7;
sbit in7 = P2^1;
sbit in8 = P2^2;
#define cycle 200
void Delayms(unsigned int z)
{
unsigned int a, b;
for (a = z; a > 0; a--)
for (b = 110; b > 0; b--);
}
void Forward()
{
in1 = 1;
in2 = 0;
in3 = 1;
in4 = 0;
in5 = 1;
in6 = 0;
in7 = 1;
in8 = 0;
}
void Stop()
{
in1 = 0;
in2 = 0;
in3 = 0;
in4 = 0;
in5 = 0;
in6 = 0;
in7 = 0;
in8 = 0;
}
void Reverse()
{
in1 = 0;
in2 = 1;
in3 = 0;
in4 = 1;
in5 = 0;
in6 = 1;
in7 = 0;
in8 = 1;
}
void Turn_left()
{
in1 = 0;
in2 = 1;
in3 = 1;
in4 = 0;
in5 = 1;
in6 = 0;
in7 = 0;
in8 = 1;
}
void Turn_right()
{
in1 = 1;
in2 = 0;
in3 = 0;
in4 = 1;
in5 = 0;
in6 = 1;
in7 = 1;
in8 = 0;
}
void Trace()
{
if((trace1 == 0) && (trace2 == 0))
{
Delayms(50);
Forward();
Delayms(cycle);
Stop();
Delayms(cycle);
}
if((trace1 == 0) && (trace2 == 1))
{
Delayms(50);
Turn_left();
Delayms(cycle);
Stop();
Delayms(cycle);
}
if((trace1 == 1) && (trace2 == 0))
{
Delayms(50);
Turn_right();
Delayms(cycle);
Stop();
Delayms(cycle);
}
if((trace1 == 1) && (trace2 == 1))
{
Delayms(50);
Forward();
Delayms(cycle);
Stop();
Delayms(cycle);
}
}
void main()
{
while(1)
{
Trace();
}
}
|
寻迹收获
- 可能没啥好展示的,其中宏定义中的cycle数值,可能要根据自己的实际情况去改变一下,好了,明天写蓝牙的那部分代码,今晚有点困,先睡了,不熬夜~~~
- 以及这些代码都是能运行的,不知道当初调了多少BUG,莫名其妙的不对,寻迹模块还是中途换过
的,今晚过了测试,才写的这个博客。
- 每个程序猿经历过的莫名奇妙的让人脑仁疼的破BUG,可能都能当一段故事吹一下,前几天不对,
今天又对了,还真是奇怪,被我归结为模块原因(其实是代码是在改不动了)。嗯,Goodnight.